电影视效制作中的Matchmove
电影视效制作中的Matchmove
lingyun简述
Matchmoving是后期视效制作中使用的一种技术,主要是对镜头画面进行摄像机反求和运动追踪。
摄像机反求,通俗来说就是通过追踪的二维点解算,还原镜头拍摄时真实的三维像机路径。
在实际工作中,matchmoving人员还会涉及到一点layout的工作。
layout翻译过来是布局,在求得三维相机后,需根据空间比例,透视关系,进行拍摄场景的还原。
即是将前期拍摄时的摄像机,被摄的人物与场景,在三维软件中进行虚拟重建。
下游组在得到“布局”好的文件后,才能往里放入三维动画,模型,特效等元素。
所以matchmoving在整个制作中是比较上游的部分,是完成一个特效镜头的“地基”。
历史
最早的VFX跟踪使用可能是在1985年,其来源于导弹制导系统中使用跟踪的概念。
在没有数字跟踪前,对于大多数特效镜头,相机都是静止不动的。
ILM拥有一个称为MM2的早期2D跟踪软件系统,该系统首先在《Hook and Death Becomes Her》中进行了测试。MM2不是自动化工具,而是手动2D微调工具,艺术家可以通过该工具手动更改位置关键帧。
而后,ILM的TD基于Fourier-domain算法,开发了最早的无标记跟踪系统,“rle_coarse”(用于像素级跟踪),“rle_fine”(用于子像素跟踪)和“rle_track”(适用于Graphics Gems点跟踪工具),用于从点数据中查找3d摄像机位置。
1992年,最早的跟踪系统Flame在NAB上首次亮相,并在1992年的Siggraph上正式发布。
2001年,boujou在NAB上推出,这个软件的普及让更多的3D专业人士认识和使用相机跟踪。
软件
- Boujou
- Pftrack
- SynthEyes
- 3DEqualizer
- Mocha

以上是市面上常见的摄像机反求软件,这里不对软件进行更多的介绍与评价。
如果想详细了解,可到软件的官网查看相关简介。
难点
在实际制作经验中,摄像机反求存在以下三个痛点:
- 畸变(Distortion)
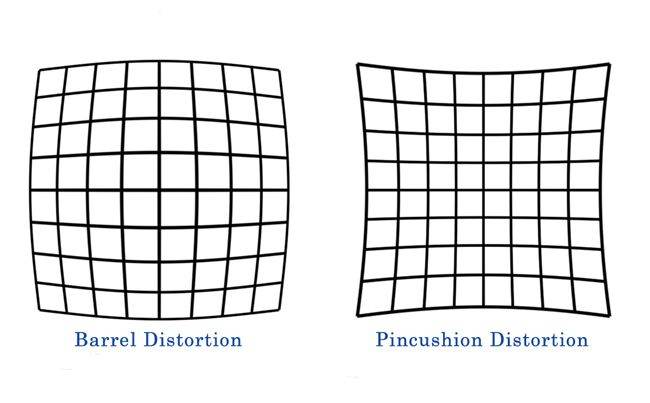
当拍摄的素材存在畸变,二维跟踪点越接近画幅边缘,跟踪点提供的坐标信息越不准确。
这会增加解算像机时的错误率,得到错误的三维locator。
不过跟踪软件都具有矫正畸变的功能,对于普通的畸变都可以很好的解决。
而这里提到的难点是针对于anamorphic镜头和鱼眼镜头。
anamorphic镜头拍摄到的素材畸变往往带有畸变动画的,比如《无耻混蛋》电影中的一幕

还有就是鱼眼镜头,比如运动相机gopro拍摄出来的素材,这类镜头焦距小,往往畸变很大,矫正也较为困难。

- 运动模糊(Motion blur)

当摄像机快速移动的时候,被摄物就会产生模糊拖影。
而这样的“不清晰”在添加二维跟踪点的时候就会变得困难许多。
- 遮挡(Occlude)
遮挡同样是会影响添加二维跟踪点,因为跟踪点必须是添加到场景中静止不动的元素上,
如果场景中太多移动的元素,并且遮挡在镜头前,摄像机的反求也会变得困难重重。

依赖
说到摄像机反求,不得不提到Onset。
Onset可以理解为前期拍摄时的数据采集和现场辅助。
而摄像机反求依赖于相机数据,比如镜头对应的摄像机filmback,focal length。甚至有时候需要Onset人员提供Distortion grid和Scan model,以帮助反求时更准确的解算。
总结
国内的电影视效还处于初中级的起步阶段,MatchMover在国内来说算是相对冷门的职业。
相较于动画,渲染,合成来说,需求并不算多。
现在大多成熟的MatchMover也慢慢在往layout和Motion capture靠近。
这两项也是国内视效发展的重要趋势,也为更多的Matchmoving工作者提供了更多的可能性。